Plan, Activity, and Intent Recognition: Theory and Practice, FIRST EDITION (2014)
Part V. Applications
Chapter 12. Recognizing Player Goals in Open-Ended Digital Games with Markov Logic Networks
Eun Y. Ha, Jonathan P. Rowe, Bradford W. Mott and James C. Lester, North Carolina State University, Raleigh, NC, USA
Abstract
In digital games goal recognition centers on identifying the concrete objectives that a player is attempting identifying the concrete objectives that a player is attempting to achieve given a domain model and a sequence of actions in a virtual environment. Goal-recognition models in open-ended digital games introduce opportunities for adapting gameplay events based on the choices of individual players, as well as interpreting player behaviors during post hoc data mining analyses. However, goal recognition in open-ended games poses significant computational challenges, including inherent uncertainty, exploratory actions, and ill-defined goals. This chapter reports on an investigation of Markov logic networks (MLNs) for recognizing player goals in open-ended digital game environments with exploratory actions. The goal-recognition model was trained on a corpus collected from player interactions with an open-ended game-based learning environment known as CRYSTAL ISLAND. We present experimental results, in which the goal-recognition model was compared to n-gram models. The findings suggest the proposed goal-recognition model yields significant accuracy gains beyond the n-gram models for predicting player goals in an open-ended digital game.
Keywords
Goal recognition
Digital games
Educational games
Markov logic networks
n-grams
Plan recognition
Acknowledgments
The authors wish to thank members of the IntelliMedia Group of North Carolina State University for their assistance, Omer Sturlovich and Pavel Turzo for use of their 3D model libraries, and Valve Software for access to the SourceTM engine and SDK. This research was supported by the National Science Foundation under Grants REC-0632450, DRL-0822200, and IIS-0812291. Any opinions, findings, and conclusions or recommendations expressed here are those of the authors and do not reflect the views of the National Science Foundation. Additional support was provided by the Bill and Melinda Gates Foundation, the William and Flora Hewlett Foundation, and EDUCAUSE.
12.1 Introduction
Goal recognition, and its more general form of plan recognition, are classic problems in artificial intelligence [6,20,37]. Goal recognition is the process of identifying the high-level objective that an agent is trying to achieve based on an observed sequence of actions performed by the agent. It is a restricted form of plan recognition, a task that involves identifying both the agent’s goal and the action sequence that will achieve that goal based on an observed sequence of actions. These tasks, plan recognition and goal recognition, are connected by their shared focus on recognizing patterns in action sequences, and they are widely regarded as key components of human intelligence.
The capacity to interpret patterns in others’ actions is critical for navigating everyday situations, such as driving a car, holding a conversation, or playing a sport. Consequently, computational models of plan recognition are relevant to a broad range of applications. Plan- and goal-recognition models have been devised for story understanding systems [5], productivity software [16], intelligent tutoring systems [9], and dialogue systems [4]. More recently, related models for activity recognition have been used to create assistive technologies for the disabled [8] as well as aircraft-refueling recognizers that operate on video data [15]. An emerging, promising application area for goal-recognition systems is digital games [14,19,21,25,26]. Digital games vary considerably in genre and gameplay style, giving rise to many formulations of goal-recognition tasks.
Digital games continue to grow increasingly complex in their graphical presentations, interaction designs, and simulation capabilities. However, digital games rarely demonstrate capabilities for interpreting players’ low-level actions at higher levels—in other words, recognizing patterns in player behavior—to dynamically adapt game events. A key example of this missing capability is games’ inability to recognize players’ goals. Recognizing a player’s goals in a digital game involves identifying the concrete objectives that a player is attempting to achieve given a domain model and sequence of actions in the virtual environment. In theory, games have full access to fine-grained information about players’ actions, and this data could be used by goal-recognition models to drive how games respond to players’ behavior at runtime. Yet digital games have traditionally relied on comparatively unsophisticated methods, such as scripts, triggers, and state machine-driven approaches, for reacting to player behavior, leading to rigid and sometimes artificial results [40].
If adopted, goal-recognition models offer several prospective benefits to game creators. First, they expand the potential of player-adaptive games, which dynamically adapt game events in response to players’ actions [31]. As an illustrative example, consider a game in which a player forms a goal to give some food, an apple, to a hungry villager. Later in the narrative, unbeknownst to the player, the apple will emerge as an important element of the game’s narrative; the player will discover that the apple is transmitting an infectious disease that the player must diagnose. Giving the apple to the villager conflicts with this planned narrative. The player will not be able to later examine the apple if he has previously fed it to the hungry villager.
Without a goal-recognition model, the game is unable to interpret the player’s actions as anything more than a sequence of movements, object manipulations, and conversations. A goal-recognition model enables the player-adaptive game to recognize the player’s goal and subsequently infer that the goal conflicts with the planned narrative. Using knowledge about the player’s goal, the player-adaptive game can dynamically augment the game experience, such as by directing the villager to refuse the apple.
Second, game-based learning environments stand to benefit from goal-recognition models. Interpreting players’ goals and plans is valuable in assessment, particularly for subjects where the player is expected to demonstrate a problem-solving strategy or complex multistep skill in the virtual environment. More generally, goal-recognition models can inform intelligent tutoring systems embedded within game-based learning environments [18,22]. Accurately diagnosing students’ problem-solving goals is essential for intelligent tutors to assess what concepts and skills a player understands, as well as possible misconceptions that she may possess. These capabilities enable intelligent tutoring systems to provide hints or remediation tailored to individual learners.
Third, goal recognizers can provide valuable information for telemetry efforts by game developers. Game telemetry involves remotely collecting, storing, and analyzing log data about player behaviors, yielding information about how players use digital games “in the wild” [41]. Over the past several years, telemetry has been the subject of growing interest as game developers seek information to inform future game designs, such as which items are most popular or which regions of virtual maps cause gameplay problems. Adding goal-recognition models to developers’ suites of game telemetry tools facilitates high-level interpretations of players’ raw interaction data. Goal-recognition models equip analysts with tools to identify players’ intentions, determine which gameplay strategies are most successful, and adjust parts of the game that cause frustration or lead to players quitting.
While goal-recognition models show promise for a broad range of games, their potential for enriching open-ended (or “sandbox”) games is especially notable. Open-ended games, such as the popular Elder Scroll series [3] and Minecraft [24], feature expansive environments and multiple paths for accomplishing in-game objectives [39]. In these immersive 3D games, players choose the goals they want to pursue, and they develop their own plans to achieve them. Goals can be formed in several ways in open-ended games: the software may explicitly present goals for the player to achieve, or the player may implicitly define the goals for herself during gameplay, effectively hiding the goals from the software.
In either of these cases, goals may be well defined (e.g., Retrieve the magical staff from the dragon’s cave and return it to the magician) or they may be ill defined (e.g., Build a castle on the mountain). Players may perform actions in deliberate sequences in order to accomplish goals, or they may perform actions in an exploratory manner, inadvertently encountering or achieving goals. Successive goals within a game may be independent of one another, or they may have complex interrelationships defined by overarching narrative structures. Each of these variations introduces significant challenges for goal recognition.
Goal-recognition models in digital games must cope with several sources of inherent uncertainty. A single sequence of player actions is often explainable by multiple possible player goals, and a given goal can be achieved through a wide range of possible action sequences. Although logical representations enable concise encodings of structural relations in goal-recognition domains, they lack support for reasoning about uncertainty. Markov logic networks (MLNs) provide a formalism that unifies logical and probabilistic representations into a single framework, preserving the representational properties of first-order logic while supporting reasoning about uncertainty as made possible by probabilistic graphical models [30]. This chapter reports on an investigation of MLNs for recognizing player goals in an open-ended digital game environment with exploratory actions. Specifically, we evaluate the predictive accuracy of MLN-based goal-recognition models for a story-centric, game-based learning environment.
This chapter surveys prior work on player goal recognition in digital games. We also motivate our decision to use Markov logic networks for goal recognition, comparing our framework to other computational approaches for goal recognition in various domains, as well as recent work leveraging MLNs for related tasks. We describe a MLN goal-recognition model that was trained on a corpus collected from player interactions with an open-ended, game-based learning environment called CRYSTAL ISLAND. In CRYSTALISLAND, players are assigned a single high-level objective: solve a science mystery. Players interleave periods of exploration and deliberate problem solving in order to identify a spreading illness that is afflicting a research team stationed on the island. In this setting, goal recognition involves predicting the next-narrative subgoal that the player will complete as she solves the interactive mystery.
We present findings that suggest the MLN goal-recognition model yields significant accuracy gains beyond alternative probabilistic approaches for predicting player goals. We discuss the study’s implications, both in terms of algorithmic techniques for goal recognition, as well as methodologies that leverage digital games for investigating goal-recognition models. We conclude with an examination of future directions.
12.2 Related Work
Recognizing players’ goals and plans offers significant promise for increasing the effectiveness of digital game environments for education, training, and entertainment. Plan recognition, which seeks to infer agents’ goals along with their plans for achieving them from sequences of observable actions, has been studied for tasks ranging from traffic monitoring [28] to operating system usage [4] to story understanding [7]. Plan recognition is inherently uncertain, and solutions supporting reasoning under uncertainty (e.g., Bayesian models [7], probabilistic grammars [28], and hidden Markov models [5]) have demonstrated strong empirical performance in a range of settings. In the restricted form of plan recognition that focuses on inferring users’ goals without concern for identifying their plans or subplans, goal-recognition models have been automatically acquired using statistical corpus-based approaches without the need for hand-authored plan libraries [4].
The classic goal-recognition problem assumes that a single agent is pursuing a single goal using deterministic actions, and it assumes that a user’s plan can be identified using a given plan library. A major focus of recent work on goal and plan recognition has been probabilistic approaches that relax several of these assumptions. For example, Ramirez and Geffner [29] describe a plan-recognition approach that does not require the provision of an explicit plan library. Hu and Yang [17] describe a two-level goal-recognition framework that uses conditional random fields and correlation graphs to support recognition of multiple concurrent and interleaving goals.
Geib and Goldman [11] have devised the PHATT algorithm, which is a Bayesian approach to plan recognition that focuses on plan execution. PHATT provides a unified framework that supports multiple concurrent goals, multiple instantiations of a single goal, and principled handling of unobserved actions. Geib and Goldman [12] also proposed a lexical parsing-based approach to plan recognition that supports plans with loops. While probabilistic approaches have achieved considerable success, the propositional nature of probabilistic graphical models introduces limitations in formalizing plan-recognition models.
Recent efforts have begun to focus on statistical relational learning frameworks for plan and activity recognition. Statistical relational learning techniques combine the representational strengths of logical formalisms and the capabilities for reasoning under uncertainty, which are often associated with probabilistic graphical models. Of particular note, Markov logic networks provide a single, unified formalism that supports structured representations and probabilistic reasoning. Sadilek and Kautz [36] used Markov logic to investigate activity recognition in a multiagent Capture the Flag game using GPS data. In their model, a MLN combines hard and soft constraints derived from Capture the Flag rules to de-noise and label GPS data in terms of “capture” events. Experiments demonstrated that the MLN model significantly outperforms alternate probabilistic and nonprobabilistic approaches, correctly identifying 90% of the capture events. Although they are related, our work differs from Sadilek and Kautz’s in several ways: (1) our models encode minimal domain-specific knowledge (i.e., our constraints are not first-order encodings of game rules), (2) our focus is only on a single agent’s behavior, and (3) our focus is on modeling goals, with cyclical relationships between goals and actions, rather than modeling players’ activities.
Singla and Mooney [38] devised a method for constructing MLN-based plan-recognition models using abductive reasoning over planning domains. Their method is comprised of two parts: a Hidden Cause model, which augments Markov logic to support efficient abduction (inference from observations to explanations), and an abductive model construction procedure that reduces the number of atomic groundings considered while constructing ground Markov networks. Experiments found that Singla and Mooney’s approach improved predictive accuracy over competing techniques. However, by framing the problem in terms of abductive inference, their approach requires that a formal description of the planning domain be available. In our work, goal recognition is conceptualized as a classification problem. Our approach does not directly perform abductive inference over the planning domain as in the approach of Singla and Mooney; therefore it does not require a planning domain to be explicitly provided.
There have been several studies of goal- and plan-recognition models in digital games. Kabanza and colleagues [19] explored challenges with behavior recognition in real-time strategy (RTS) games, which involve opposing armies battling for control of regions using complex tactics and units. Their work extended the Geib and Goldman PHATT algorithm [11] to perform intent recognition on the behaviors of RTS opponents. Preliminary experiments using game replays achieved 89% accuracy, although the authors assumed fully observable actions for the purposes of their initial evaluation.
In other work, Laviers and Sukthankar [21] combined plan-recognition and plan-repair models for real-time opponent modeling in a football videogame. Their approach used Upper Confidence bounds applied to Trees (UCT) in order to learn plan-repair policies in real time. The plan-repair policies enabled the offense to adjust its passing plan after recognizing the defense’s play. In an empirical evaluation, the UCT approach outperformed baseline and heuristic-based plan-repair methods in terms of yardage gain metrics and reductions in interceptions thrown. It should be noted that while both of these studies focused on plan-recognition (and related) tasks in digital games, the tasks have major structural and application differences from our work involving exploratory actions in open-ended games.
More closely related to the study described in this chapter, Albrecht, Zukerman, and Nicholson [1] conducted an early examination of Bayesian networks for plan recognition in adventure games. The study compared several alternate Bayesian network structures for predicting players’ quests, actions, and locations in a text-based multiuser dungeon adventure game. The evaluation found that network structures incorporating both action and location data outperformed ablated versions with reduced connectivity and variables. However, no comparisons to non-DBN baselines were performed.
More recently, Gold [14] investigated Input-Output Hidden Markov Models (IOHMM) for recognizing high-level player goals in a simple 2D action-adventure game. The IOHMM model, which used hand-engineered parameters as opposed to machine-learned parameters, was compared to a hand-authored finite state machine (FSM)—a common representational technique used in commercial games. A preliminary evaluation involving human subjects observed that the IOHMM model did outperform the FSM baseline. However, the generalizability of the findings was unclear due to the hand-authored nature of the model and baseline, as well as the relative simplicity of the application. The work also differed from our work in that it did not involve exploratory actions; player goals were directly presented to players in the upper left part of their screens.
Studies of The Restaurant Game [26] examined data-driven techniques for devising plan networks from thousands of user interactions with a simulated restaurant scenario. The plan networks encode common action sequences associated with customer–waiter interactions in a restaurant setting. An evaluation of the plan networks found they achieved high interrater reliability with human judges in assessing the “typicality” of observed restaurant sequences in the game environment. While work on The Restaurant Game is related to classic plan-recognition tasks, it has largely focused on different and, in some ways, simpler modeling tasks.
The work presented in this chapter investigates a Markov logic network goal-recognition framework for the CRYSTAL ISLAND open-ended educational game. CRYSTAL ISLAND shares several characteristics with adventure games (e.g., exploring a virtual environment, advancing an emerging narrative, and collecting and manipulating objects). Although several goal-recognition studies have been conducted using digital games, fundamental differences among the game genres and recognition tasks suggest that there is no established state-of-the-art performance level for this area. For this reason, we evaluate the efficacy of our approach by comparing it against techniques employed in prior goal-recognition work with an earlier version of our game environment.
12.3 Observation Corpus
To investigate goal recognition in an open-ended game environment involving many possible goals and user actions, data collected from player interactions with the CRYSTAL ISLAND learning environment were used. CRYSTAL ISLAND (Figure 12.1) is a game-based learning environment for eighth-grade microbiology. It is built on Valve Software’s SourceTM engine—the 3D game platform for Half-Life 2.
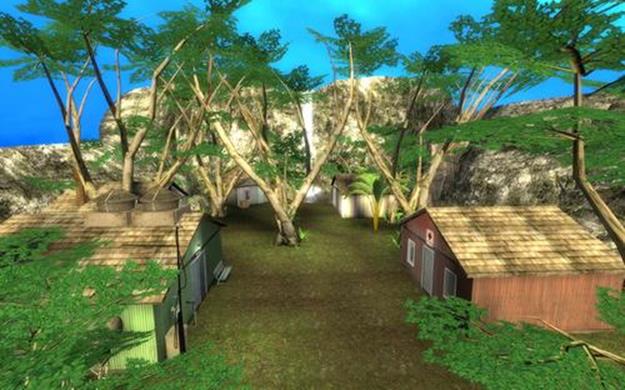
FIGURE 12.1 The CRYSTAL ISLAND virtual environment.
The environment features a science mystery in which players attempt to discover the identity and source of an infectious disease that is plaguing a research team stationed on an island. Players adopt the role of a visitor who recently arrived in order to see her sick father, but they are promptly drawn into a mission to save the entire research team from the outbreak. Players explore the research camp from a first-person viewpoint and manipulate virtual objects, converse with characters, and use lab equipment and other resources to solve the mystery. Players choose among multiple paths to investigate the mystery, and they are free to identify and pursue goals in a range of different orders.
CRYSTAL ISLAND has been the subject of extensive empirical investigation and has been found to provide substantial learning and motivational benefits [35]. Players consistently demonstrate significant learning gains after using CRYSTAL ISLAND, and they report experiencing boredom less frequently than in alternative instructional software. The environment is also challenging for players, with less than 50% of players solving the mystery in under an hour. The current investigation of goal-recognition models is part of an overarching research agenda focused on AI techniques for dynamically shaping players’ interactions with game-based learning environments. Prior work has focused on a range of computational modeling tasks, including probabilistic representations for user knowledge modeling [34] and machine learning frameworks for driving characters’ affective behaviors [33].
The present work is most closely related to two prior investigations of user models with CRYSTAL ISLAND. The first is the Mott, Lee, and Lester [25] investigation of Bayesian networks and n-gram models for goal recognition (2006). Although we adopt and extend several ideas from that research, the present work uses a significantly modified version of CRYSTAL ISLAND, as well as a version that does not explicitly advise players about which goals to next achieve. The current version of CRYSTAL ISLAND is substantially more open ended, as players are encouraged to identify and follow their own paths to solve the mystery.
The present work also complements a prior investigation of user knowledge modeling with dynamic Bayesian networks [34]. That work employed hand-engineered dynamic Bayesian networks to model player beliefs related to the narrative backstory, science curriculum, mystery solution, and gameplay mechanics. The current work models users’ goals with a MLN, which leverages parameters (i.e., weights) induced from user-interaction data. The two categories of models are distinct but complementary, and in concert they could be used to drive decisions about how to dynamically tailor game events to individual players.
Player interactions with CRYSTAL ISLAND are comprised of a diverse set of actions occurring throughout the seven major locations of the island’s research camp: an infirmary, a dining hall, a laboratory, a living quarters, the lead scientist’s quarters, a waterfall, and a large outdoor region. Players can perform actions that include the following: moving around the camp, picking up and dropping objects, using the laboratory’s testing equipment, conversing with virtual characters, reading microbiology-themed books and posters, completing a diagnosis worksheet, labeling microscope slides, and taking notes. Players advance through CRYSTAL ISLAND’s nonlinear narrative by completing a partially ordered sequence of goals that comprise the scenario’s plot. Seven narrative goals are considered in this work:speaking with the camp nurse about the spreading illness, speaking with the camp’s virus expert, speaking with the camp’s bacteria expert, speaking with a sick patient, speaking with the camp’s cook about recently eaten food, running laboratory tests on contaminated food, andsubmitting a complete diagnosis to the camp nurse.
The following scenario illustrates a typical interaction with CRYSTAL ISLAND. (See Figure 12.2 for a related sequence of screenshots.) The scenario begins with the player’s arrival at the research camp (Figure 12.3). The player approaches the first building, an infirmary, where several sick patients and a camp nurse are located. The player approaches the nurse and initiates a conversation with her. The nurse explains that an unidentified illness is spreading throughout the camp and asks for the player’s help in determining a diagnosis. The conversation with the nurse takes place through a combination of multimodal character dialogue—spoken language, gesture, facial expression, and text—and player dialogue menu selections. All character dialogue is provided by voice actors and follows a deterministic branching structure.
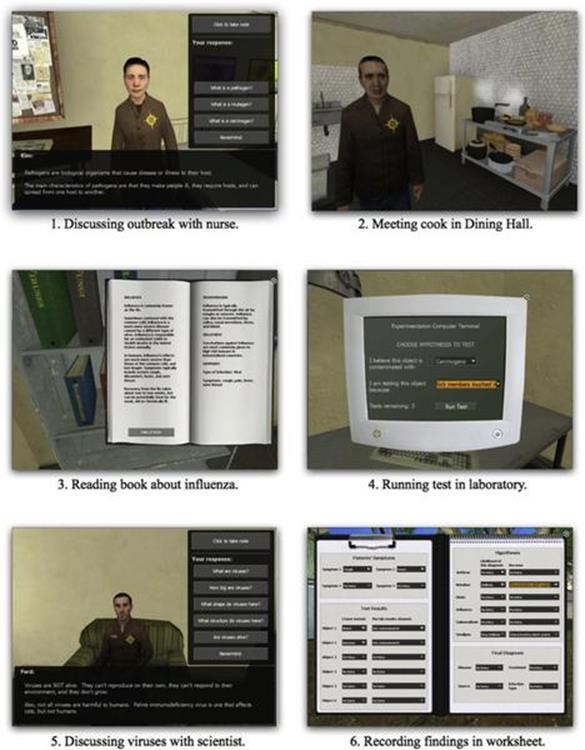
FIGURE 12.2 Sample events in the CRYSTAL ISLAND narrative.
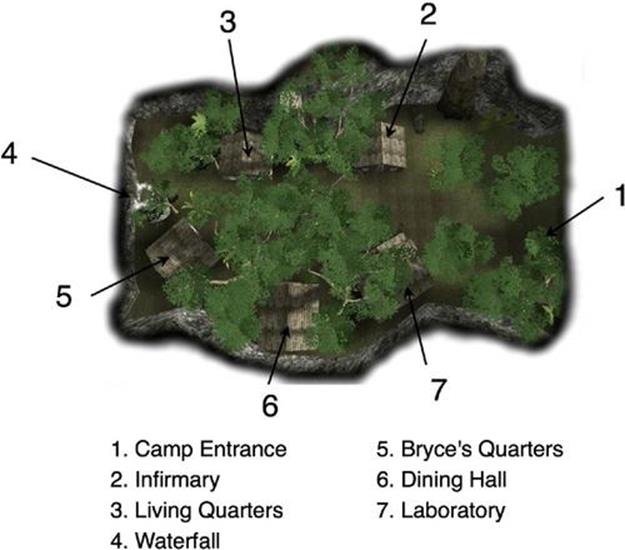
FIGURE 12.3 Map of the CRYSTAL ISLAND research camp.
After speaking with the nurse, the player has several options for investigating the illness. Inside the infirmary, the player can talk to sick patients lying on medical cots. Clues about the team members’ symptoms and recent eating habits can be discussed and recorded using the in-game note-taking features. Alternatively, the player can move to the camp’s dining hall to speak with the camp cook. The cook describes the types of food that the team has recently eaten and provides clues about which items warrant closer investigation. In addition to learning about the sick team members, the player has several options for gathering information about disease-causing agents. For example, the player can walk to the camp’s living quarters where she will encounter a pair of virtual scientists who answer questions about viruses and bacteria. The player can also learn more about pathogens by viewing posters hanging inside of the camp’s buildings or reading books located in a small library. In this way, the player can gather information about relevant microbiology concepts using resources presented in multiple formats.
Beyond gathering information from virtual scientists and other instructional resources, the player can conduct tests on food objects using the laboratory’s testing equipment. The player encounters food items in the dining hall and laboratory, and she can test them for pathogenic contaminants at any point during the learning interaction. A limited number of tests are allocated to the player at the start of the scenario, but additional tests can be earned by answering microbiology-themed multiple-choice questions posed by the camp nurse.
After running several tests, the player discovers that the sick team members have been consuming contaminated milk. Having arrived at this finding, the player is instructed to see the lab technician, Elise, for a closer look. The screen momentarily fades to black to indicate elapsing time, and Elise returns with an image of the contaminated specimen, which she explains was taken using a microscope. At this point, the player is presented with a labeling exercise during which she must identity the contamination as bacterial in nature. After successfully completing this activity, the player uses in-game resources to investigate bacterial diseases associated with symptoms matching those reported by the sick team members. Once she has narrowed down a diagnosis and a recommended treatment, she records them in a diagnosis worksheet and returns to the infirmary to inform the camp nurse. If the player’s diagnosis worksheet contains errors, the nurse identifies the errors and recommends that the player keep working. If the player correctly diagnoses the illness and specifies an appropriate treatment, the mystery is solved.
The data used for investigating MLN goal-recognition models were collected from a study involving the eighth grade population of a public middle school. There were 153 participants in the study. Data for 16 of the participants was removed from the analysis due to incomplete data or prior experience with CRYSTAL ISLAND. Participants whose data was included had no prior experience with the software. All player actions were logged by the CRYSTAL ISLAND software and stored for later analysis. The log files were generated by a modified version of the SourceTM engine’s built-in logging features, and they consist of chronological, flat sequences of time-stamped actions.
In the corpus, each student is associated with a single log file, except in cases of hardware and/or software crashes, which occasionally resulted in multiple logs. Examples of actions recorded in the log files include movements between locations, pickup object events, drop object events, conversation initiation events, dialogue turn events, read book events, and goal-achievement events. Additionally, the raw logs include records of players’ positions and orientations, which are recorded several times per second, although the data are filtered out in the present analysis. Arguments for each action (e.g., the object that was dropped, the book that was read) are included in each entry of the logs.
12.4 Markov Logic Networks
The goal-recognition model described in this chapter uses the statistical relational learning framework provided by Markov logic networks (MLNs) [30]. Statistical relational learning frameworks support modeling complex phenomena for domains in which the assumption of independent and identically distributed data does not hold. This section provides a brief overview of MLNs.
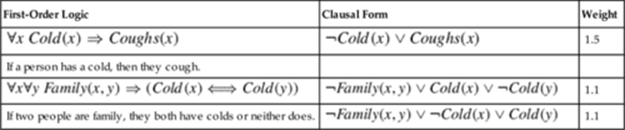
An MLN is a knowledge base that consists of first-order logic formulae and a finite set of constants representing domain objects. In contrast to traditional first-order logic, in which logic formulae have binary values (i.e., true or false) and represent hard constraints, each formula in an MLN is associated with a weight that has a real number value and represents a soft constraint that is allowed to be violated. When the arguments of every predicate in the first-order knowledge base are replaced with all possible domain constants and a truth value is assigned to each ground predicate, it represents a possible world that can be constructed from the given knowledge base.
In traditional first-order logic, possible worlds have binary values: the value of a possible world is true when all the ground formulae in the knowledge base are true; otherwise, it is false. In contrast, an MLN defines a probability distribution over possible worlds in a continuous range. Weights of MLN formulae reflect the strength of the constraint that their associated logic formula imposes on the possible worlds. Table 12.1 shows an example of a simple MLN, which consists of two first-order logic formulae and associated weights.
Table 12.1
Example MLN
Formally, an MLN is defined as a set of tuples ![]() in which
in which ![]() is a first-order logic formula in the knowledge base and
is a first-order logic formula in the knowledge base and ![]() is a real number. Grounded with domain constants
is a real number. Grounded with domain constants ![]() , an MLN defines a Markov network (MN), also known as a Markov random field. An MN is an undirected probabilistic graphical model that defines a joint distribution of a set of random variables
, an MLN defines a Markov network (MN), also known as a Markov random field. An MN is an undirected probabilistic graphical model that defines a joint distribution of a set of random variables ![]()
![]() [27]. The MN defined by a ground MLN has a graph node for each ground predicate in the MLN. The value of the node is 1 if the corresponding ground predicate is true and 0 otherwise. Two nodes in the graph are connected by an edge if and only if their corresponding ground predicates appear together in at least one ground MLN formula. Thus, the MN has a unique feature (i.e., a clique in the graph) for each ground MLN formula.
[27]. The MN defined by a ground MLN has a graph node for each ground predicate in the MLN. The value of the node is 1 if the corresponding ground predicate is true and 0 otherwise. Two nodes in the graph are connected by an edge if and only if their corresponding ground predicates appear together in at least one ground MLN formula. Thus, the MN has a unique feature (i.e., a clique in the graph) for each ground MLN formula.
Figure 12.4 depicts a graphical structure of a ground MLN, which is constructed by applying domain constants A and B to the MLN in Table 12.1. The value of the feature is 1 if the corresponding ground MLN formula is true and 0 otherwise. Features in MNs are assigned the same weights as their corresponding MLN formulae. The probability distribution over possible worlds for a ground MLN is defined by the following equation:
 (12.1)
(12.1)
in which ![]() represents the number of formulae in the MLN and
represents the number of formulae in the MLN and ![]() is the number of groundings of a formula
is the number of groundings of a formula ![]() that has true value in the given world
that has true value in the given world ![]() .
. ![]() is a normalization constant, which is computed as:
is a normalization constant, which is computed as:
 (12.2)
(12.2)
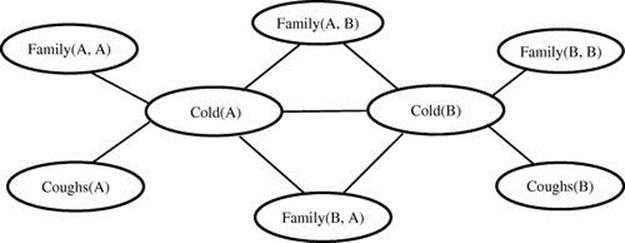
FIGURE 12.4 Graphical structure of MLN in Table 12.1.
Cutting Plane Inference (CPI) provides an accurate and efficient Maximum a posteri (MAP) method for MLNs [32]. CPI is a meta-algorithm that instantiates a small fraction of a given complex MLN incrementally and solves it using a conventional MAP inference method such as MaxWalkSAT or integer linear programming. At each incremental step, the CPI refines a current solution by instantiating only those portions of the complete MN for which the current solution can be further optimized. CPI has been shown to improve the efficiency of MAP inference compared to conventional methods alone.
By combining first-order logic syntax and probabilistic graphical models, MLNs bring together the characteristics of both probabilistic and logical approaches to modeling complex phenomena. From a probability perspective, MLNs can be viewed as templates for constructing large Markov networks, which allow an incremental, modular approach to incorporate knowledge bases into the network. From a logic perspective, Markov logic provides a mechanism to handle uncertainty and contradictory data in a knowledge base. The work presented in this chapter leverages MLNs as a template language to construct a MN for goal recognition in open-ended digital games.
12.5 Goal Recognition with Markov Logic Networks
Drawing on previous goal-recognition research [4,25], the work presented in this chapter defines goal recognition as the task of predicting the most likely goal for a given sequence of observed low-level player behavior in the game environment. It is assumed that a given sequence of player behavior maps to a single goal, and no interleaving occurs between different goals. We attribute all actions leading up to a goal (and taking place after the previous goal was achieved) as part of the action sequence associated with that goal. In part, this assumption is due to the nature of our data; that is, during data collection, we could not directly observe students’ intentions as they played CRYSTAL ISLAND. Therefore, we identified students’ narrative goals during post hoc analysis. During data collection, students did not self-report their goals, nor did trained human experts provide judgments about students’ intentions as they played CRYSTAL ISLAND. Although these techniques—student think-alouds and expert observational protocols—hold promise for yielding data that enable relaxation of single-goal assumptions, these efforts are reserved for future work.
Under the described conditions, goal recognition is cast as a classification problem in which a learned classifier predicts the most likely goal for the present observed player behavior. With the given task formulation, the current goal-recognition model leverages task structure in CRYSTAL ISLAND both at the local and global levels. That is, the local task structure is encoded as pairwise ordering patterns of goals, and the global task structure is incorporated by a special attribute that encodes the player’s progress in solving the problem within the narrative scenario. The next subsection discusses the representation of player behavior used in our goal-recognition model, the motivation to use MLNs for goal recognition, and the MLN goal-recognition model.
12.5.1 Representation of Player Behavior
Similar to previous work by [25], the current work encodes low-level player behavior in the game environment using three attributes: action type, location, and narrative state.
Action type: Type of current action taken by the player such as moving to a certain location, opening a door, and testing an object using the laboratory’s testing equipment. Our data includes 19 distinct types of player actions. The current work only considers the type (e.g.,OPEN) of the action but does not include the associated arguments (e.g., laboratory-door) because adding action arguments did not offer clear benefits for the learned model, which was likely caused by a data-sparsity problem. However, action arguments in principle provide richer semantics for goal-recognition models. In future work, we plan to investigate the utility of action arguments with a larger dataset.
Location: Place in the virtual environment where a current player action is taken. This includes 39 fine-grained and nonoverlapping sublocations that decompose the 7 major camp locations in CRYSTAL ISLAND.
Narrative state: Representation of the player’s progress in solving the narrative scenario. Reflecting the global task structure of CRYSTAL ISLAND, narrative state is encoded as a vector of four binary variables, each of which represents a milestone event within the narrative. The four milestone events considered are: discuss the illness with the nurse, test the contaminated object, submit a diagnosis to the nurse, and submit a correct diagnosis to the nurse. The first two are also subgoals that the player needs to achieve. If a milestone event has been accomplished, the associated variable is assigned a value of 1; otherwise, the value of the variable is 0.
12.5.2 Motivation
The data described in the previous section pose significant challenges for goal recognition. First, individual goals are not independent of one another. Goals in our data represent milestone activities players take in the course of solving the science mystery. Some of these activities naturally occur in sequential patterns driven by the game’s narrative structure. The layout of the island can also impose co-occurrence patterns among goals. Thus, the previous goal can impact the probabilities associated with alternate values for the current goal. To model these associations among the milestone activities, goals should be inferred in relation to one another rather than in isolation. Second, the causality between player behavior and goals is ambiguous. In CRYSTAL ISLAND, players are not given an explicit list of goals to achieve; instead, players discover goals while interacting with the virtual environment. Thus, causality between player behavior and goals is bidirectional. In other words, a goal could influence a player’s current behavior if she has a particular goal in mind and it is also possible that the player’s current behavior will reveal which goal she next pursues. For instance, a player can enter a new location without a particular goal in mind and afterward can engage a character in a conversation that reveals a new goal.
To address the first challenge, the current work uses a statistical relational learning framework, which offers principled methods for collective classification in which multiple objects are jointly modeled [13]. In our case, the goal-recognition model jointly classifies successive goals. To address the second challenge, the current work, in particular, considers MLNs [30] because of the underlying semantics of undirected graphical models (see Section 12.4). In contrast to directed graphical (digraph) models, which encode explicit causality among the entities, undirected graphical models represent mutual influence among entities; this is well suited for representing ambiguous causality between player behavior and goals in our data. In addition, the first-order logic syntax of MLNs offers an intuitive interface for developers to work with data in order to construct complex Markov networks.
12.5.3 Markov Logic Network for Goal Recognition
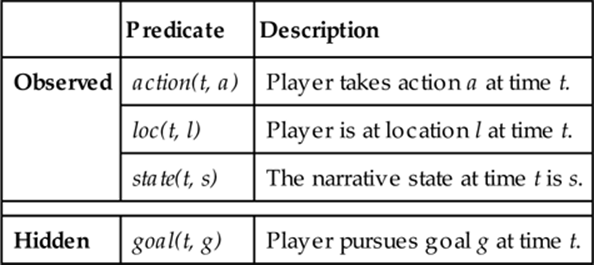
We first defined a set of predicates as the basic building blocks to form MLN formulae for the proposed goal-recognition model. There are two types of predicates: observed and hidden. Observed predicates are those that are fully observable by the game environment while a player is performing actions. In contrast, hidden predicates are those that are not directly observable within the game environment. Instead, the groundings of the hidden predicates are predicted using MAP inference based on a learned model. In other words, hidden predicates represent the target phenomena being modeled. In our case, there is one hidden predicate, goal(t, g), which represents the player’s goal at time t. Three observed predicates were defined, each representing an attribute of player loc(t, l), and state(t, s). Table 12.2 lists these observed and hidden predicates.
Table 12.2
Observed and Hidden Predicates
By combining the observed and the hidden predicates with logical operations, a total of 13 MLN formulae were constructed. As shown in Figure 12.5, our goal-recognition MLN consists of 1 hard formula and 12 soft formulae. A hard formula represents a constraint that needs to be satisfied at all times. For instance, Formula F1 requires that, for each action a at each timestep t, there exists a single goal g. In MLNs, hard formulae are assigned an arbitrarily large weight. The formulae F2 through F13 are soft formulae, which represent constraints that are allowed to be violated. Formula F2 reflects prior distribution of goals in the corpus. Formulae F3 through F11 predict a player’s goal g at a given time t based on the observed player behavior.
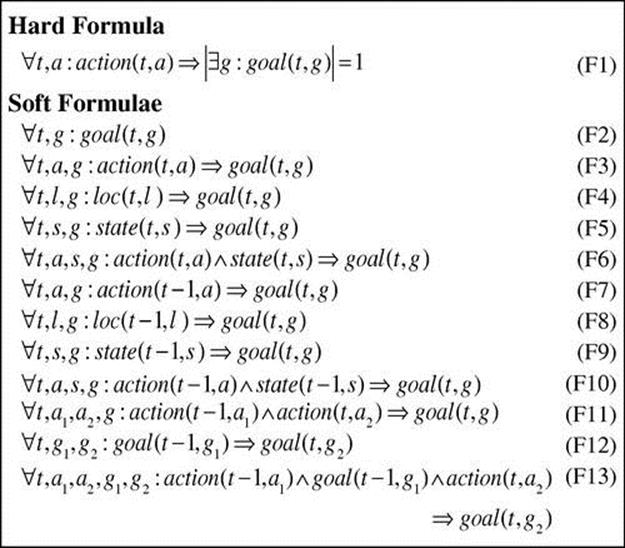
FIGURE 12.5 Formulae for MLN goal-recognition model.
Instead of aggregating all three attributes of player behavior in a single formula, we modeled the impacts of each individual attribute separately by defining an MLN formula for each attribute. Combinations of the attributes were also considered. In contrast to F3 through F11 that predict individual goals separately from others, F12 and F13 jointly predict sequentially adjacent pairs of goals by exploiting their ordering patterns. The weights for the soft constraints were learned by using theBeast—an off-the-shelf tool for MLNs that employs the CPI method for MAP inference [32]. All of these formulae are included in the current goal-recognition model. Figure 12.6 illustrates a partial graphical representation of the described MLN.
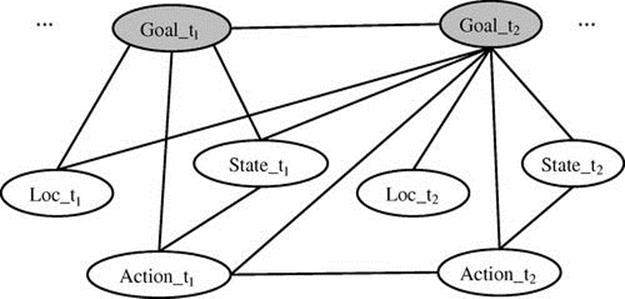
FIGURE 12.6 Graphical representation of goal-recognition MLN.
12.6 Evaluation
To train and test the goal-recognition MLN, the data from the observation corpus was automatically preprocessed in several steps. First, all player actions that achieve goals were identified. Because the goals considered in our work are a set of milestone actions players achieved while solving the narrative scenario, they are logged in the same manner as other actions. Therefore, identification of goal-achieving actions can be performed automatically by scanning the gameplay data, without need for manually defining domain-specific knowledge such as which actions correspond to which goals. Second, all actions in the observation sequence that precede the current goal, but follow the previous goal, were labeled with the current goal. Third, actions that achieve goals were removed from the data. Removing goal-achieving actions was necessary to ensure that model training was fair because it would be trivial to predict goals from the goal-achieving actions. Finally, all actions taken after achievement of the last goal were also removed, since those actions did not lead to achieving a goal.
Table 12.3 shows summary statistics of the resulting corpus, which includes 77,182 player actions and 893 achieved goals, with an average of 86.4 player actions per goal. Table 12.4 shows the set of goals considered in this work and their frequencies in the processed corpus data. The most frequent goal was running laboratory test on contaminated food, which comprised 26.6% of the total goals in the corpus.
Table 12.3
Statistics for Observed Actions and Goals
|
Total number of observed player actions |
77,182 |
|
Total number of goals achieved |
893 |
|
Average number of player actions per goal |
86.4 |
Table 12.4
Distribution of Goals
|
Running laboratory test on contaminated food |
26.6% |
|
Submitting a diagnosis |
17.1% |
|
Speaking with the camp’s cook |
15.2% |
|
Speaking with the camp’s bacteria expert |
12.5% |
|
Speaking with the camp’s virus expert |
11.2% |
|
Speaking with a sick patient |
11.0% |
|
Speaking with the camp nurse |
6.4% |
For evaluation, the proposed MLN model was compared to a trivial baseline system and two nontrivial baselines. The trivial baseline was the majority baseline, which always predicted the goal that appears most frequently in the training data. The nontrivial baselines were two n-gram models adopted from previous goal-recognition work [4,25]. Although simplistic, n-gram models have been shown to be effective for goal recognition in interactive narrative game environments [25] and spoken dialogue systems [4]. The following subsections provide a detailed description of the n-gram comparison systems and report evaluation results.
12.6.1 n-gram Models
Previous work [25] defined that, given an observation sequence ![]() , the objective of goal recognition for an interactive narrative environment is to identify the most likely goal
, the objective of goal recognition for an interactive narrative environment is to identify the most likely goal ![]() , such that:
, such that:
![]() (12.3)
(12.3)
where ![]() is an observation of player behavior at a timestep i. Applying Bayes’s rule followed by the chain rule, Eq. 12.3 becomes:
is an observation of player behavior at a timestep i. Applying Bayes’s rule followed by the chain rule, Eq. 12.3 becomes:
![]() (12.4)
(12.4)
Since estimating these conditional probabilities is impractical, following an earlier approach [4], Mott et al. [25] defined two n-gram models based on a Markov assumption that an observation ![]() depends only on the goal
depends only on the goal ![]() and a limited window of preceding observations.
and a limited window of preceding observations.
The unigram model states that given the goal, ![]() is conditionally independent of all other observations (Eq. 12.5). Thus, the unigram model predicts a goal based on the current observation of player behavior only. Extending the window size by one timestep, the bigram model assumes that, given the goal
is conditionally independent of all other observations (Eq. 12.5). Thus, the unigram model predicts a goal based on the current observation of player behavior only. Extending the window size by one timestep, the bigram model assumes that, given the goal ![]() and a preceding observation
and a preceding observation ![]() is conditionally independent of all other observations (Eq. 12.6). Therefore, the bigram model considers the previous observation of player behavior as well. An observation
is conditionally independent of all other observations (Eq. 12.6). Therefore, the bigram model considers the previous observation of player behavior as well. An observation ![]() for then-gram models is an aggregate variable that combines all the attributes of player behavior.
for then-gram models is an aggregate variable that combines all the attributes of player behavior.
 (12.5)
(12.5)
In spite of the simplistic approach, Mott et al. [25] found n-gram models achieved higher prediction accuracies than a more sophisticated Bayesian network model. Similar to the MLN model described in Section 12.5, their Bayesian network model used factored representation of player behavior, modeling the influence of each attribute of player behavior separately.
 (12.6)
(12.6)
Adopting these ideas within the MLN framework, in the work presented in this chapter we constructed a unigram and a bigram goal-recognition model as MLNs, which employed an aggregate representation of player behavior. The unigram and the bigram models were defined by a single soft Formula F14 and F15, respectively. Formula F14 predicts a goal at time t from the combination of all three attributes of player behavior observed at the same timestep. Formula F15 combines the attributes of player behavior for time t, as well as time t-1, in order to predict a goal at time t. To ensure that each player action at each timestep is assigned a single goal, the hard Formula F1 (see Figure 12.5) was also added to both the unigram and the bigram models. Without any formula that encodes relations among different goals, n-gram models predict each individual goal separately and do not take into consideration the sequential association patterns among them.
![]() (F14)
(F14)
 (F15)
(F15)
12.6.2 Results
The two n-gram models, which employed an aggregate representation of player behavior, and the proposed MLN model, which used a factored representation, were trained using one-best Margin Infused Relaxed Algorithm [10] as the update rule. The entire dataset was partitioned into 10 nonoverlapping subsets, ensuring data from the same player did not appear in both the training and the testing data. Each subset of the data was used for testing exactly once. The three models were evaluated with 10-fold cross-validation on the entire dataset. The models’ performance was measured using F1, which is the harmonic mean of precision and recall. In the case of multiclass classification such as ours, there are multiple approaches to computing F1. Common approaches include computing either the micro-average or macro-average of F1. Micro-average computes F1 by treating all objects in the testing data equally regardless of the class. Macro-average takes the average of F1 scores that are separately computed for each class, by treating multiclass classification as an aggregate of binary classification.
A drawback of these approaches is entries in the confusion matrix are counted multiple times. To avoid this, an alternate approach uses the slightly different formulations of precision (Eq. 12.7) and recall (Eq. 12.8) for multiclass classification, in which the F1 score is computed as a harmonic mean of precision and recall as for the binary classification (e.g., [23]). Our work follows this approach. It should be noted that in the current work the values of precision, recall, and F1 are the same, because each observed player action is associated with a single goal in our data and the goal-recognition model predicts a single most likely goal for each player action; that is, the total number of predictions made by classifier is equal to total number of objects. These values again coincide with accuracy—another metric widely used for multiclass classification.
 (12.7)
(12.7)
 (12.8)
(12.8)
Table 12.5 shows the average performance of each compared model over 10-fold cross-validation. The factored MLN model scored 0.484 in F1, achieving an 82% improvement over the baseline. The unigram model performed better than the bigram model. A one-way repeated-measures ANOVA confirmed that the differences among the three compared models were statistically significant (F(2,18) = 71.87, ![]() ). A post hoc Tukey test revealed that the differences between all pairs of the three models were statistically significant (
). A post hoc Tukey test revealed that the differences between all pairs of the three models were statistically significant (![]() ).
).
Table 12.5
F1 Scores for MLN and Baseline Goal-Recognition Models

12.7 Discussion
Even though all three models performed better than the baseline, the factored-MLN model achieved the best performance, suggesting that the proposed MLN goal-recognition approach is effective in predicting player goals from observed player behavior in a complex game environment. The F1 score of 0.484 achieved by the factored-MLN model may appear somewhat low. However, this result is encouraging given the challenges posed by the data. The chance probability of accurately recognizing the seven goals in our data was 0.143. The superiority of the factored-MLN model compared to the n-gram models can be partially explained by the MLN’s relational learning framework, which facilitates explicit modeling of associations between goals: the factored-MLN model jointly predicts successive goals, while n-gram models predicted each individual goal separately.
Furthermore, the factored representation of player behavior enables MLNs to model richer relationships between player behavior and goals than the aggregate representation used in n-gram models. The finding that the unigram model achieved higher performance than the bigram model is consistent with the result reported [25]. Among the possible reasons for the unigram model’s superiority over the bigram model is data sparsity. The bigram model considers two consecutive previous goals, which would lead to greater sparsity than in the unigram model.
The current work is a first step toward a general approach for modeling exploratory goal recognition in digital games using MLNs. The current goal-recognition model makes relatively basic use of MLNs, modeling only sequential relationships among successive goals, but MLNs provide a principled method to incorporate richer structural relations present among the goals—for example, the relations imposed by the narrative structure of the virtual world. Also, the current work is characterized as a knowledge-lean approach to goal recognition; that is, it uses only a minimal amount of domain knowledge in the model’s specification. The only domain knowledge required for the proposed goal-recognition model was to identify the milestone events within the CRYSTALISLAND game environment.
The knowledge-lean approach offers a cost-efficient solution for devising goal-recognition models because identifying milestone events is relatively easy compared to manually annotating the data with a hand-crafted goal schema or hand-authoring the mappings between player behavior and goals. We also suspect that knowledge-lean approaches offer a more robust solution than competing approaches to goal recognition in open-ended games as a result of challenges associated with unexpected patterns in players’ exploratory behavior.
Inducing accurate goal-recognition models has several prospective benefits for game-based learning environments. Goal recognizers can be used to inform player-adaptive decisions by narrative-centered tutorial planners; such planners comprise a particular class of software agents that simultaneously reason about interactive narrative and pedagogical issues to personalize student’s game-based learning experiences. Data-driven approaches to narrative-centered tutorial planning are the subject of active research by the CRYSTAL ISLAND research team. They offer a method for dynamically tailoring events during players’ game-based learning experiences in order to individualize pedagogical scaffolding and promote player engagement.
Consider the following scenario: a player begins running laboratory tests prematurely, collecting data before he has gathered enough background information about CRYSTAL ISLAND’s outbreak scenario to adequately interpret the results. Goal-recognition models enable CRYSTAL ISLAND to predict that the player is attempting to find a contaminated object. However, this prediction prompts a subsequent inference that the player’s goal is suboptimal for the current stage of the narrative. This realization triggers an event where a virtual character suggests that the player should instead go speak with sick patients to better understand how the disease spread through the research camp. In this manner, a narrative-centered tutorial planner can dynamically tailor events to improve students’ learning outcomes and narrative experience, driven by information from goal-recognition models.
Similarly, goal-recognition models can be employed to detect situations where players attempt to solve the mystery by “gaming the system” [2]. In some cases, players may attempt to solve the mystery by guessing as they fill out the diagnosis worksheet. In this exploitative strategy, players guess responses on the worksheet, submit it to the camp nurse, receive feedback about incorrect responses, revise the worksheet, and repeat the process in hopes of stumbling upon the correct solution. A goal-recognition model could predict that the player is attempting to solve the mystery. However, if the player has not yet completed other important narrative milestones, it might be appropriate for the camp nurse to prompt the player to consider an alternate course of action. The nurse might tell the player to speak with other scientists on the island, or to collect data in the virtual laboratory, in order to obtain knowledge that will enable her to complete the diagnosis worksheet in a more deliberative fashion.
In addition to using goal-recognition models to dynamically shape events in CRYSTAL ISLAND’s narrative, goal recognizers can be used during data mining to inform the analysis and design of future iterations of the CRYSTAL ISLAND software. By automatically recognizing players’ goals, and identifying which actions are likely to be associated with those goals, the research team can gain insights about common types of problem-solving paths and challenges encountered by players. Furthermore, recognizing players’ goals can enrich in-game assessments of player learning and problem solving, which is a critical challenge for the serious games community.
The present work has several limitations that we seek to address through continued investigation. First, the available log data did not include preexisting class labels of players’ intentions. To investigate goal recognition, it was necessary to add class labels during subsequent data analysis, which necessitated single-goal assumptions that prevented consideration of concurrent or interleaving goals. In future data collections with CRYSTAL ISLAND, it may be possible to obtain class labels, or the information necessary to extract class labels, during runtime.
A common method for obtaining such data in educational research is to ask students to think aloud as they solve the problem, often with support from a researcher providing regular prompts. Although this approach provides a direct window into students’ intentions, in the past we have seen considerable variability in middle-grade students’ willingness to verbalize their thoughts as they play CRYSTAL ISLAND. This may be due to cognitive difficulties associated with simultaneously playing an unfamiliar game and verbalizing one’s own intentions, or it may be a symptom of adolescent resistance to verbal communication. In the case of the former, it may be possible to circumvent this challenge by having students watch video recordings of their own gameplay sessions after solving the mystery, providing verbal commentary about their own play experiences in a post hoc manner.
An alternative approach is training human “experts” to provide judgments about player intentions by observing students as they play the game. This approach depends on humans accurately recognizing students’ intentions in CRYSTAL ISLAND; in this case, goal data are not directly obtained from players. On the one hand, this method bypasses the need for students to verbalize their intentions, which is challenging in practice. On the other hand, it is resource-intense to gather human judgments for a large number of student gameplay sessions, a problem only exacerbated by the need for multiple judgments to enable interrater reliability calculations.
The preceding methods—think-alouds and expert observational protocols—also introduce opportunities for addressing another limitation of the present work: detecting nontraditional goals that are not represented in the set of seven narrative subgoals. For example, students may adopt ill-defined goals, such as “explore the virtual environment,” or nonnarrative goals, such as “climb on top of the dining hall,” to drive their actions. Accurately predicting these goals would substantially extend the capabilities of narrative-centered tutorial planners seeking to interpret player actions and tailor game events to individual students. However, it is necessary to obtain class labels to model these goals using the MLN-based classification approach presented in this chapter. Furthermore, plan-recognition methods that rely on inference over planning domains are unlikely to be effective for these types of intentions, as they most likely exceed the specifications typically included in most planning-domain knowledge bases.
12.8 Conclusion and Future Work
Effective goal recognition holds considerable promise for player-adaptive games. Accurately recognizing players’ goals enables digital games to proactively support gameplay experiences that feature nonlinear scenarios while preserving cohesion, coherence, and believability. This chapter introduced a goal-recognition framework based on MLNs that accurately recognizes players’ goals. Using model parameters learned from a corpus of player interactions in a complex, nonlinear game environment, the framework supports the automated acquisition of a goal-recognition system that outperforms three baseline models.
There are several promising directions for future work on goal-recognition models in open-ended digital games. First, the MLN model considered here deliberately leveraged minimal domain-specific knowledge. Devising systematic methods for encoding domain-specific information (e.g., interactive-narrative structure, gameplay mechanics) is a promising direction for improving the predictive accuracy of the models. Second, investigating the efficiency and convergence rate of MLN goal recognizers is an important step for eventually embedding these models in runtime settings because the real-time performance requirements of digital games demand highly efficient algorithms. Finally, integrating MLN goal-recognition models into the CRYSTAL ISLAND game-based learning environment is a key objective of this work. The models would drive narrative-centered tutorial planners that dynamically adapt game events to enhance students’ learning, problem solving, and engagement outcomes. This integration will enable empirical studies involving human subjects to examine the real-world impact of goal-recognition models and player-adaptive games.
References
1. Albrecht D, Zukerman I, Nicholson A. Bayesian models for keyhole plan recognition in an adventure game. User Model User-adap interact. 1998;8(1–2):5-47.
2. Baker RS, Corbett AT, Koedinger KR, Wagner AZ. Off-task behavior in the cognitive tutor classroom: when students game the system. Proceedings of the ACM Conference on Human Factors in Computing Systems. 2004:383-390.
3. Bethesda Softworks. 2011. The elder scrolls V: Skyrim. Retrieved from <www.elderscrolls.com/skyrim>![]() .
.
4. Blaylock N, Allen J. Corpus-based, statistical goal recognition. Proceedings of the Eighteenth International Joint Conference on Artificial Intelligence. 2003:1303-1308.
5. Bui HH. A general model for online probabilistic plan recognition. Proceedings of the Eighteenth International Joint Conference on Artificial Intelligence. 2003:1309-1315.
6. Carberry S. Techniques for plan recognition. User Model User-Adapted Interact. 2001;11(1–2):31-48.
7. Charniak E, Goldman RP. A Bayesian model of plan recognition. Artif Intell. 1993;64(1):53-79.
8. Chu Y, Song YC, Levinson R, Kautz H. Interactive activity recognition and prompting to assist people with cognitive disabilities. J Ambient Intell Smart Environ. 2012;4(5):443-459.
9. Conati C, Gertner A, VanLehn K. Using Bayesian networks to manage uncertainty in student modeling. User Model User-Adapted Interact. 2002;12(4):371-417.
10. Crammer K, Singer Y. Ultraconservative online algorithms for multiclass problems. J Mach Learn Res. 2003;3:951-991.
11. Geib CW, Goldman RP. A probabilistic plan recognition algorithm based on plan tree grammars. Artif Intell. 2009;173(11):1101-1132.
12. Geib C, Goldman R. Recognizing plans with loops in a lexicalized grammar. Proceedings of the Twenty-Fifth National Conference on Artificial Intelligence. 2011:958-963.
13. Getoor L, Taskar B. Introduction to statistical relational learning (adaptive computation and machine learning). The MIT Press; 2007.
14. Gold K. Training goal recognition online from low-level inputs in an action-adventure game. Proceedings of the Sixth International Conference on Artificial Intelligence and Interactive Digital Entertainment. 2010:21-26.
15. Hoogs A, Perera A. Video activity recognition in the real world. Proceedings of the Twenty-Third National Conference on Artificial Intelligence. 2008:1551-1554.
16. Horvitz E, Breese J, Heckerman D, Hovel D, Koos R. The Lumiere project: Bayesian user modeling for inferring the goals and needs of software users. Proceedings of the Fourteenth Conference on Uncertainty in Artificial Intelligence. 1998:256-265.
17. Hu DH, Yang Q. CIGAR: concurrent and interleaving goal and activity recognition. Proceedings of the Twenty-Third National Conference on Artificial Intelligence. 2008:1363-1368.
18. Johnson WL. Serious use of a serious game for language learning. Int J Artif Intell Educ. 2010;20(2):175-195.
19. Kabanza F, Bellefeuille P, Bisson F. Opponent behavior recognition for real-time strategy games. Proceedings of the AAAI-10 Workshop on Plan, Activity, and Intent Recognition. 2010.
20. Kautz H, Allen JF. Generalized plan recognition. Proceedings of the Fifth National Conference on Artificial Intelligence. 1986:32-37.
21. Laviers K, Sukthankar G. A real-time opponent modeling system for rush football. Proceedings of the Twenty-Second International Joint Conference on Artificial Intelligence. 2011:2476-2481.
22. Lee SY, Mott BW, Lester JC. Real-time narrative-centered tutorial planning for story-based learning. Proceedings of the 11th International Conference on Intelligent Tutoring Systems. 2012:476-481.
23. Marcu D. The rhetorical parsing of unrestricted texts: a surface-based approach. Comput Linguist. 2000;26(3):395-448.
24. Mojang. 2009. Minecraft. Retrieved from <www.minecraft.net/>![]() .
.
25. Mott B, Lee S, Lester J. Probabilistic goal recognition in interactive narrative environments. Proceedings of the Twenty-First National Conference on Artificial Intelligence. 2006:187-192.
26. Orkin J, Roy D. The restaurant game: learning social behavior and language from thousands of players online. J Game Devel. 2007;3(1):39-60.
27. Pietra SD, Pietra VDP, Lafferty J. Inducing features of random fields. IEEE transactions on pattern analysis and machine intelligence. 1997;19(4):380-393.
28. Pynadath DV, Wellman MP. Probabilistic state-dependent grammars for plan recognition. Proceedings of the Sixteenth Conference on Uncertainty in Artificial Intelligence. 2000:507-514.
29. Ramirez M, Geffner H. Probabilistic plan recognition using off-the-shelf classical planners. Proceedings of the Twenty-Fourth AAAI Conference on Artificial Intelligence. 2010:1121-1126.
30. Richardson M, Domingos P. Markov logic networks. J Mach Learn. 2006;62(1–2):107-136.
31. Riedl MO, Saretto CJ, Young RM. Managing interaction between users and agents in a multi-agent storytelling environment. Proceedings of the 2nd International Conference on Autonomous Agents and Multiagent Systems. 2003:741-748.
32. Riedel S. Improving the accuracy and efficiency of MAP inference for Markov logic. Proceedings of the Twenty-Fourth Annual Conference on Uncertainty in Artificial Intelligence. 2008:468-475.
33. Robison J, McQuiggan S, Lester J. Evaluating the consequences of affective feedback in intelligent tutoring systems. Proceedings of the International Conference on Affective Computing and Intelligent Interaction. 2009:37-42.
34. Rowe J, Lester J. Modeling user knowledge with dynamic Bayesian networks in interactive narrative environments. Proceedings of the Sixth International Conference on Artificial Intelligence in Interactive Digital Entertainment. 2010:57-62.
35. Rowe J, Shores L, Mott B, Lester J. Integrating learning, problem solving, and engagement in narrative-centered learning environments. Int J Artif Intell Educ. 2011;21(1–2):115-133.
36. Sadilek A, Kautz H. Recognizing multi-agent activities from GPS data. Proceedings of the Twenty-Fourth AAAI Conference on Artificial Intelligence. 2010:1134-1139.
37. Schmidt C, Sridharan N, Goodson J. The plan recognition problem: an intersection of psychology and artificial intelligence. Artif Intell. 1978;11:45-83.
38. Singla P, Mooney R. Abductive Markov logic for plan recognition. Proceedings of the Twenty-Fifth AAAI Conference on Artificial Intelligence. 2011:1069-1075.
39. Squire K. Open-ended video games: a model for developing learning for the interactive age. In: Salen K, ed. The ecology of games: connecting youth, games, and learning. The MIT Press; 2008:167-198.
40. Yannakakis G. Game AI revisited. Proceedings of ACM Computing Frontier Conference. 2012.
41. Zoeller G. Game development telemetry. Proceedings of the Game Developers Conference. 2010.
All materials on the site are licensed Creative Commons Attribution-Sharealike 3.0 Unported CC BY-SA 3.0 & GNU Free Documentation License (GFDL)
If you are the copyright holder of any material contained on our site and intend to remove it, please contact our site administrator for approval.
© 2016-2026 All site design rights belong to S.Y.A.