Make: 3D Printing (2014)
Part VII. Applications
Chapter 19. How I Printed a Humanoid
Michael Overstreet
In recent years I’ve experimented with 3D printing the structural brackets for my humanoid robot Boomer (Figure 19-1). Boomer and I compete at RoboGames and show off at Maker Faires, and people always ask me: Why 3D printing? Why not just make the brackets out of metal like everyone else?
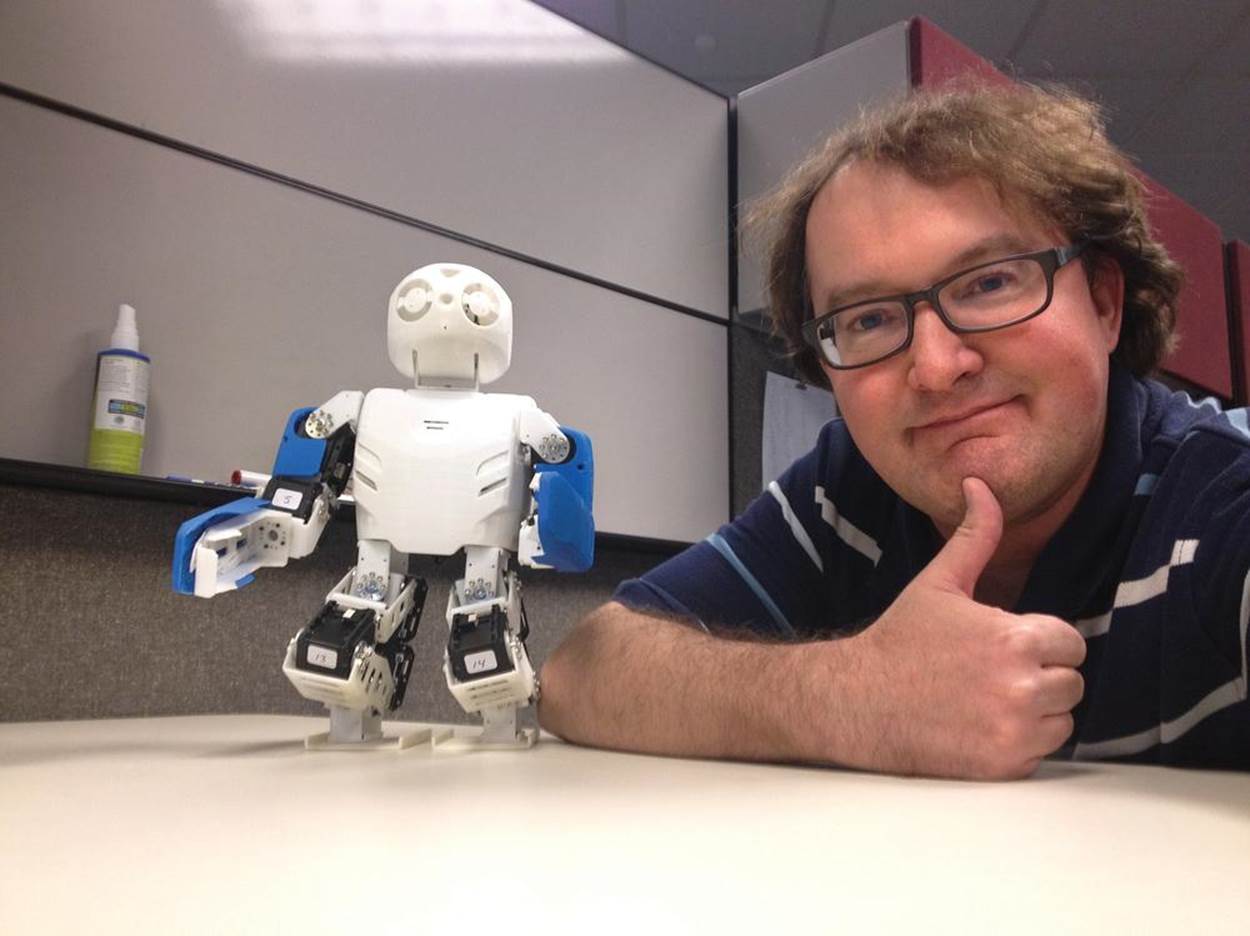
Figure 19-1. Michael and Boomer
I started to do it just because I could. The advent of cheap DIY 3D printers has given makers a new way to manufacture and customize objects, and I was simply exploring this new process. As I printed more parts for my robot, I realized that it could be done—and done cheaply.
Then I saw the DARwIn-OP at the 2010 International Conference on Humanoid Robots. After seeing how capable and groundbreaking it was, I wanted one. But how could I afford it? A new DARwIn-OP from Robotis costs $12,000.
HUMANOID EVOLUTION
The DARwIn-OP (Dynamic Anthropomorphic Robot with Intelligence—Open Platform) is a state-of-the-art research and development humanoid robot created by Virginia Tech’s Robotics and Mechanisms Laboratory (RoMeLa), led by Dr. Dennis Hong, in collaboration with the University of Pennsylvania, Purdue University, and the South Korean company Robotis, with support from the National Science Foundation.
Weighing in at just 2.9 kg and standing 45.5 cm tall, the DARwIn-OP won the gold medal in the autonomous RoboCup Soccer Humanoid League, Kid Size class, in both 2011 and 2012.
That’s how this project got started. My mission was to print as much of the robot as possible using a DIY 3D printer costing $2,000 or less. DARwIn-OP is an open hardware and software project, so all of the 3D files and plans are free online. I bought 20 Dynamixel MX-28T servos and the complete electronics kit from Robotis.
Today, my DARwIn-OP clone (Figure 19-2) is fully assembled, and I’ve spent about $6,100, not counting the costs of the 3D printers I used. That’s still a lot—but it’s almost half off the factory price.

Figure 19-2. Meet the clone!
Here are some of the things that made this possible:
90% DIY printed
I print my parts in ABS plastic, as PLA is weaker and more brittle. I strongly agree with the review of the UP! Plus/Afinia printer in the 2012 Make: Ultimate Guide to 3D Printing. It’s one of the best on the market, and it has printed 90% of my clone: servo brackets, structural framing, and body covers.
Top servos
Robotis Dynamixel digital servomotors are the leading robotics servos in the world—fast, high torque, and very high resolution.
Glues not screws
Nuts and bolts are not ideal for plastic. I glue my 3D-printed brackets together using Micro-Mark’s Same Stuff (Figure 19-3) liquid plastic welder or an ABS-acetone slurry.

Figure 19-3. Micro-Mark’s Same Stuff
Off-the-shelf brains
The DARwIn-OP is controlled by an affordable Fit-PC2 compact PC and a Robotis CM-730 servo controller (Figure 19-4).

Figure 19-4. The brains of the bot
Here are some of the challenges I faced:
The toughest parts
A few parts, designed for aluminum or injection-molded plastic, are almost impossible for a DIY printer. The front body cover must be printed at the highest resolution—that’s 16 hours on my printer, and a lot can go wrong in 16 hours. I had Shapeways print the head and body covers, using their laser sintering process. I hope to modify these parts for a DIY printer—or to find one that can handle them.
Tricky widths
Some parts are one and a half or two and a half extruder paths wide instead of two or three. Many DIY printers and slicer programs can’t overcome this problem, causing hollow passageways within walls that weaken the part. Also problematic: body covers are barely one path wide.
Lessons Learned
Here are a few more things that helped along the way.
Free 3D design
I had to fine-tune some of the parts, so I used Autodesk’s 123D design software to create my STL files, both for its price (free) and its ease of use (see Figure 19-5).
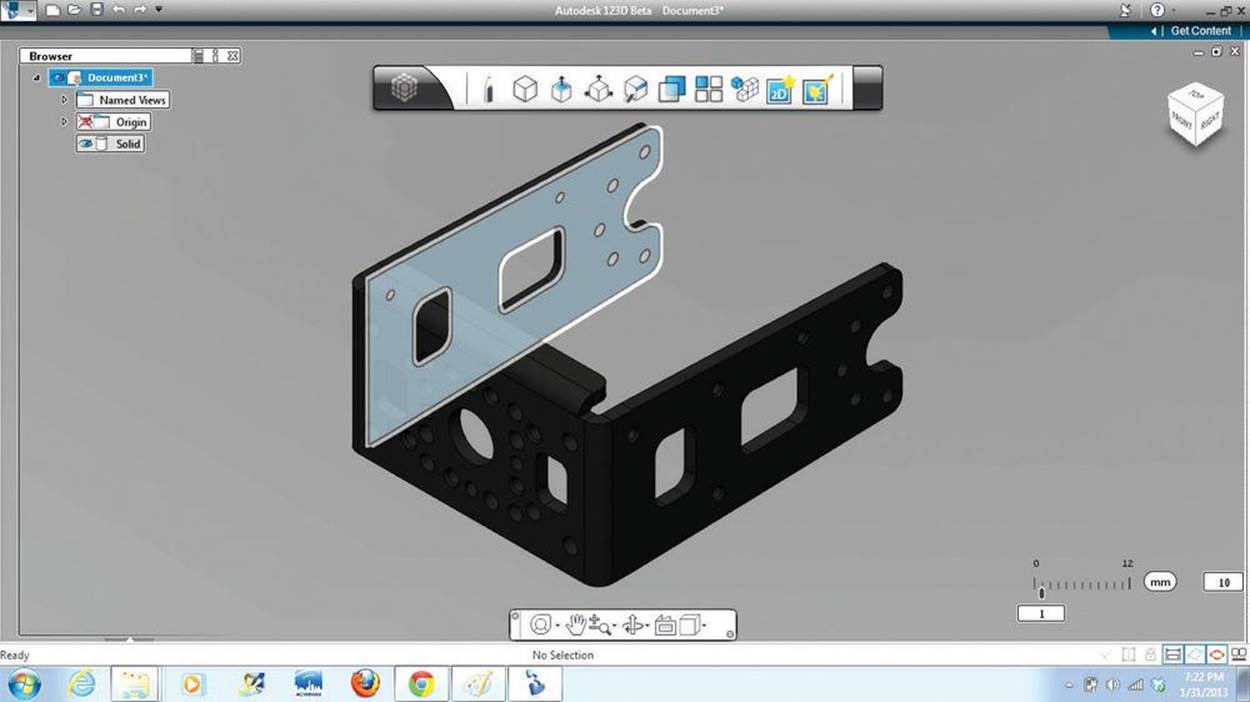
Figure 19-5. 3D-printed bracket
Rafts and support material
I like the UP! Plus 3D printer’s accuracy and its automatic generation of both rafts (disposable footings that prevent warping) and support material to prop up overhangs, bridges, and screw holes (Figure 19-6). I still had to play around with the orientation of parts on the build platform, because this can affect the printing of overhangs and supports (see Figures 19-7 and 19-8).
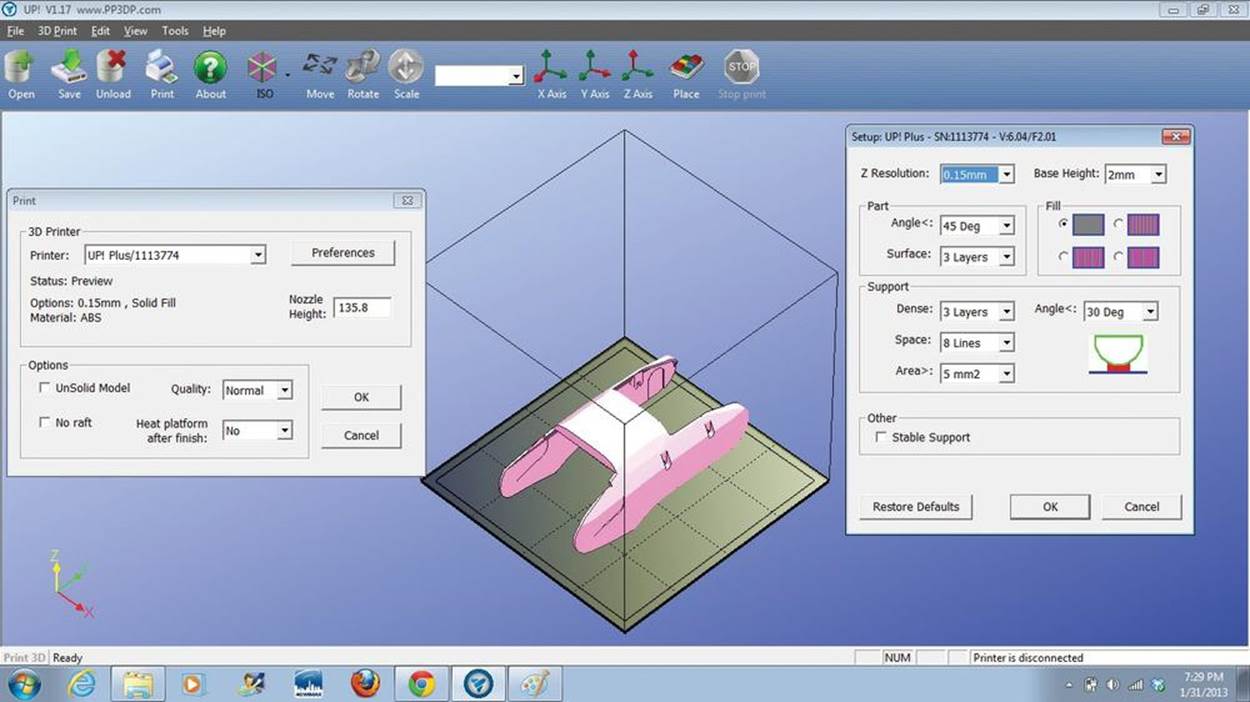
Figure 19-6. UP! software
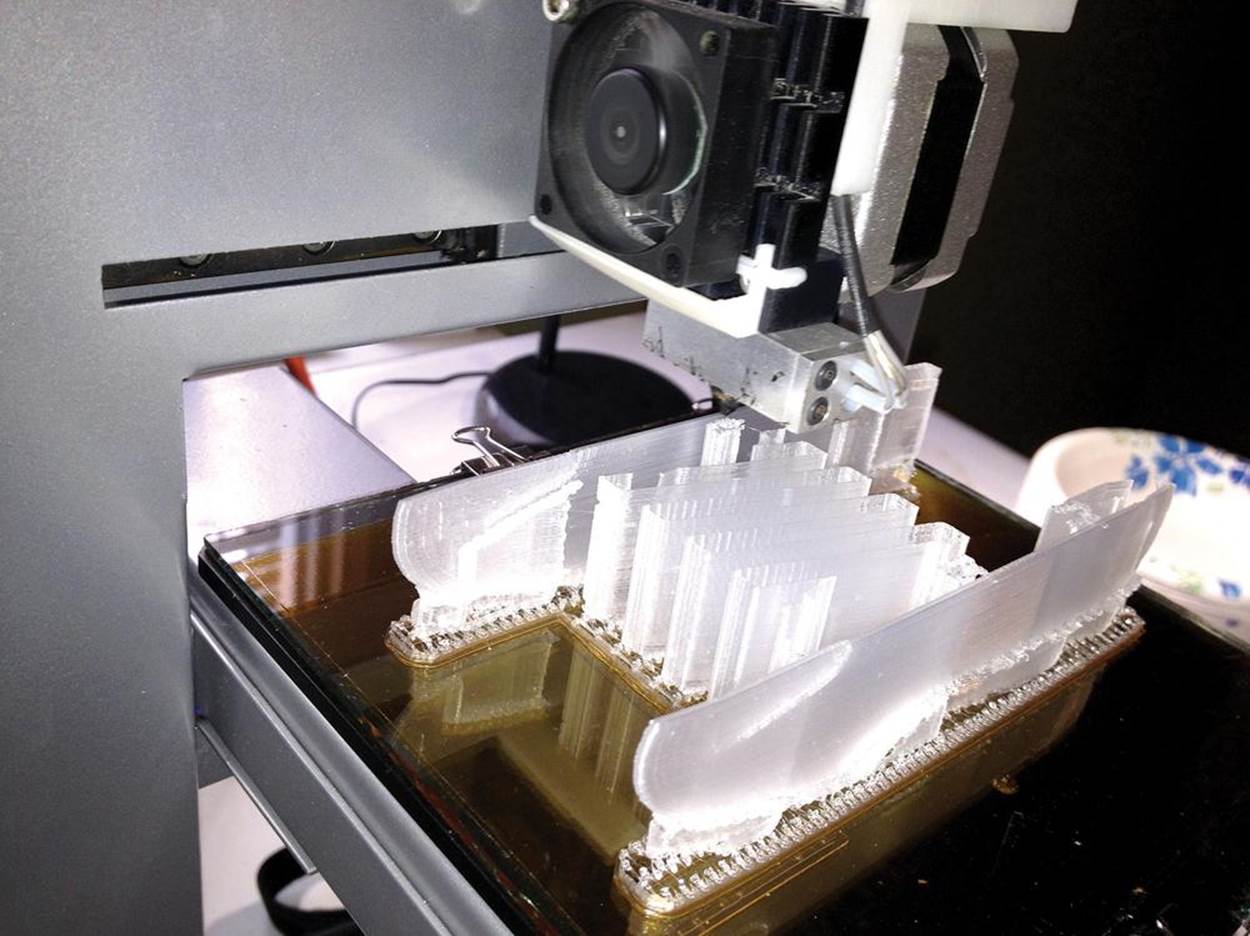
Figure 19-7. Printing with support material on the UP! Plus
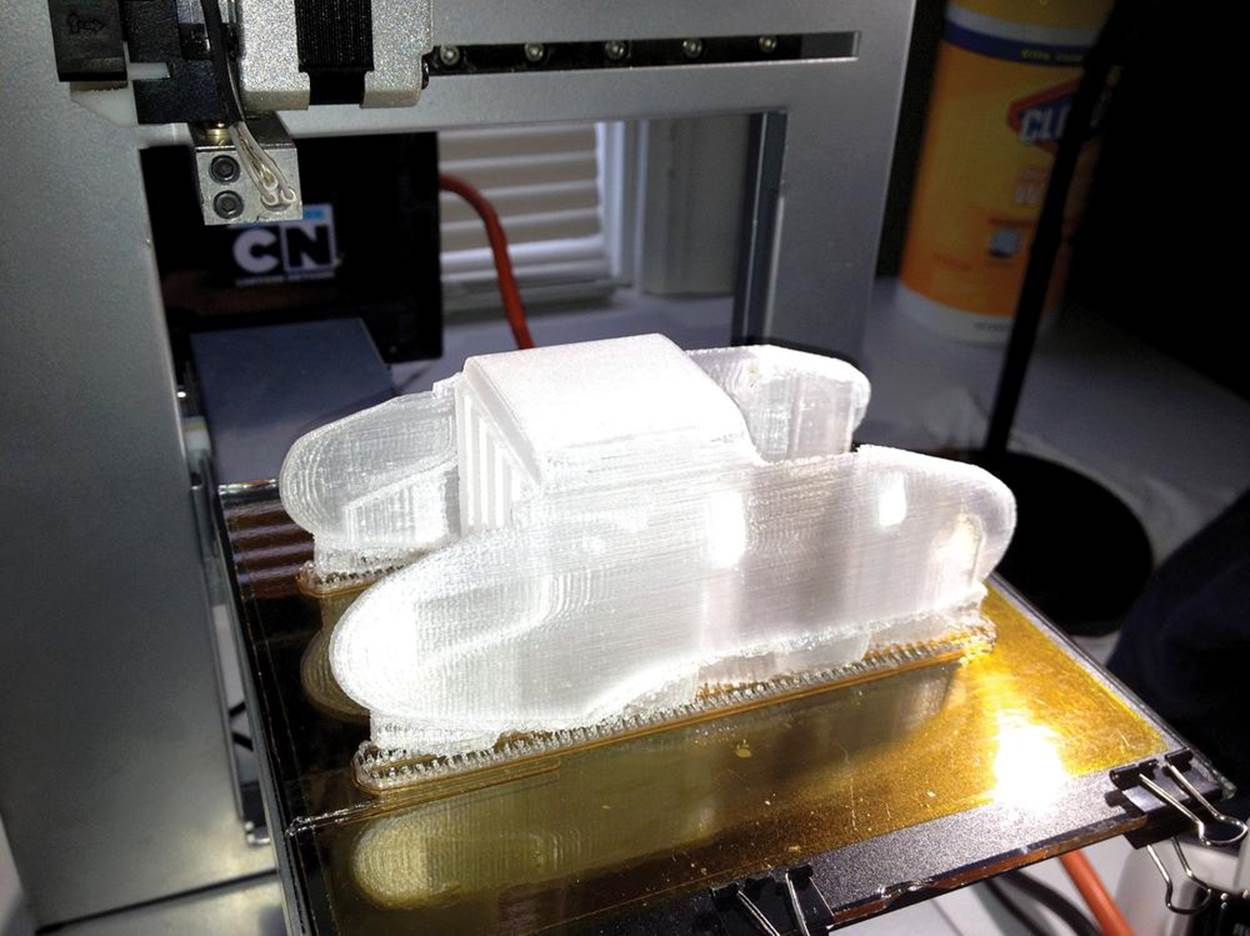
Figure 19-8. Finished printed humanoid part
Heated platform
Printing in ABS requires a build platform heated to about 110°F. To improve performance, I upgraded my Up Plus platform to glass covered with Kapton tape for adhesion.
Leveling the platform
Learn the paper leveling trick: if a sheet of paper can freely move between the extruder tip and the build platform, you’re OK. If not, then the extruder tip is too close. If it moves too easily or you see a gap, then it’s too far away.
Awesome manuals
The open source DARwIn-OP manuals are the most comprehensive and detailed I’ve ever worked with—they break down the entire assembly into easy steps (Figures 19-9 through 19-11). I thank Dr. J.K. Han of Robotis for the tireless work he must have put into creating them!

Figure 19-9. Step-by-step humanoid documentation
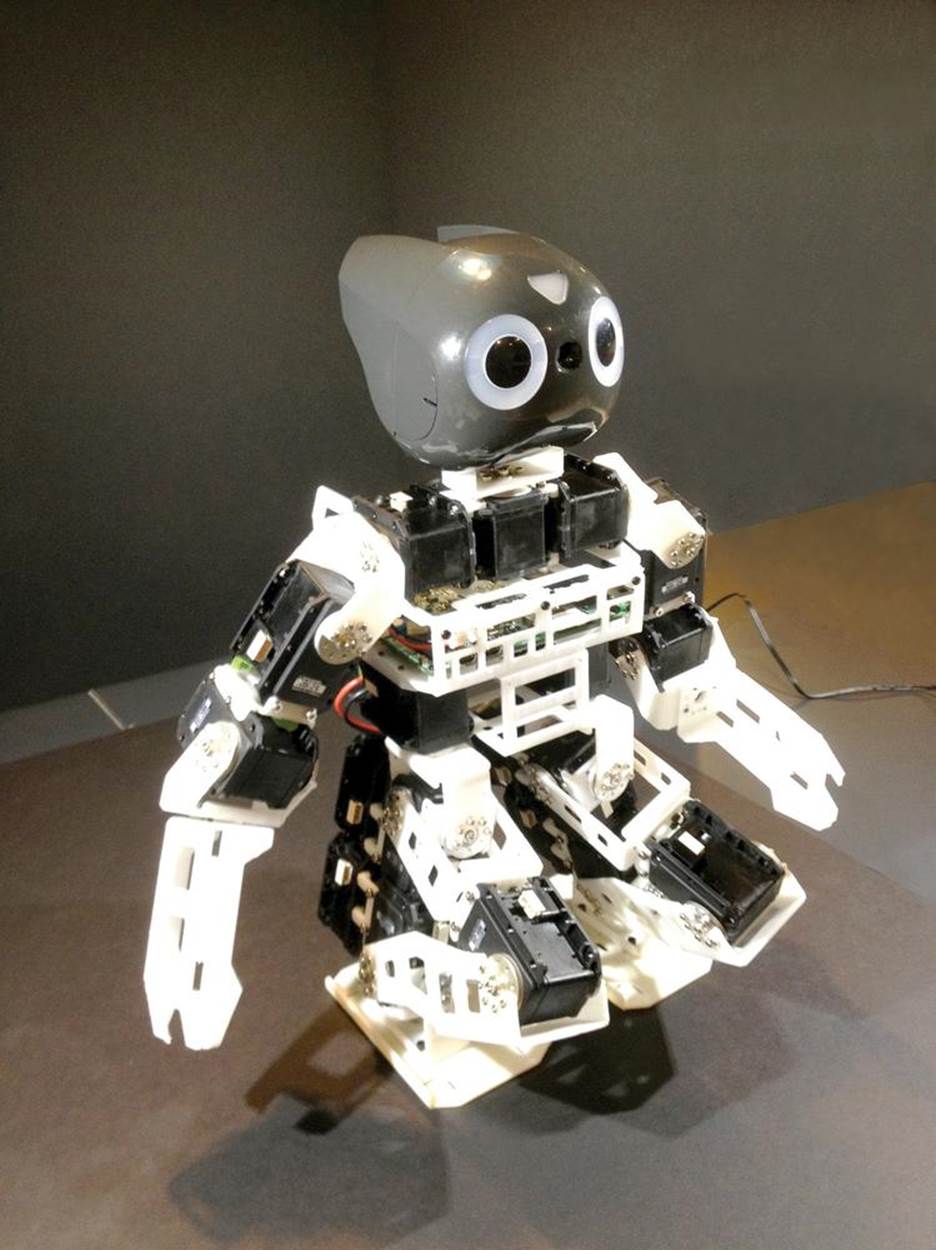
Figure 19-10. Humanoid robot design from the Robotis assembly manual
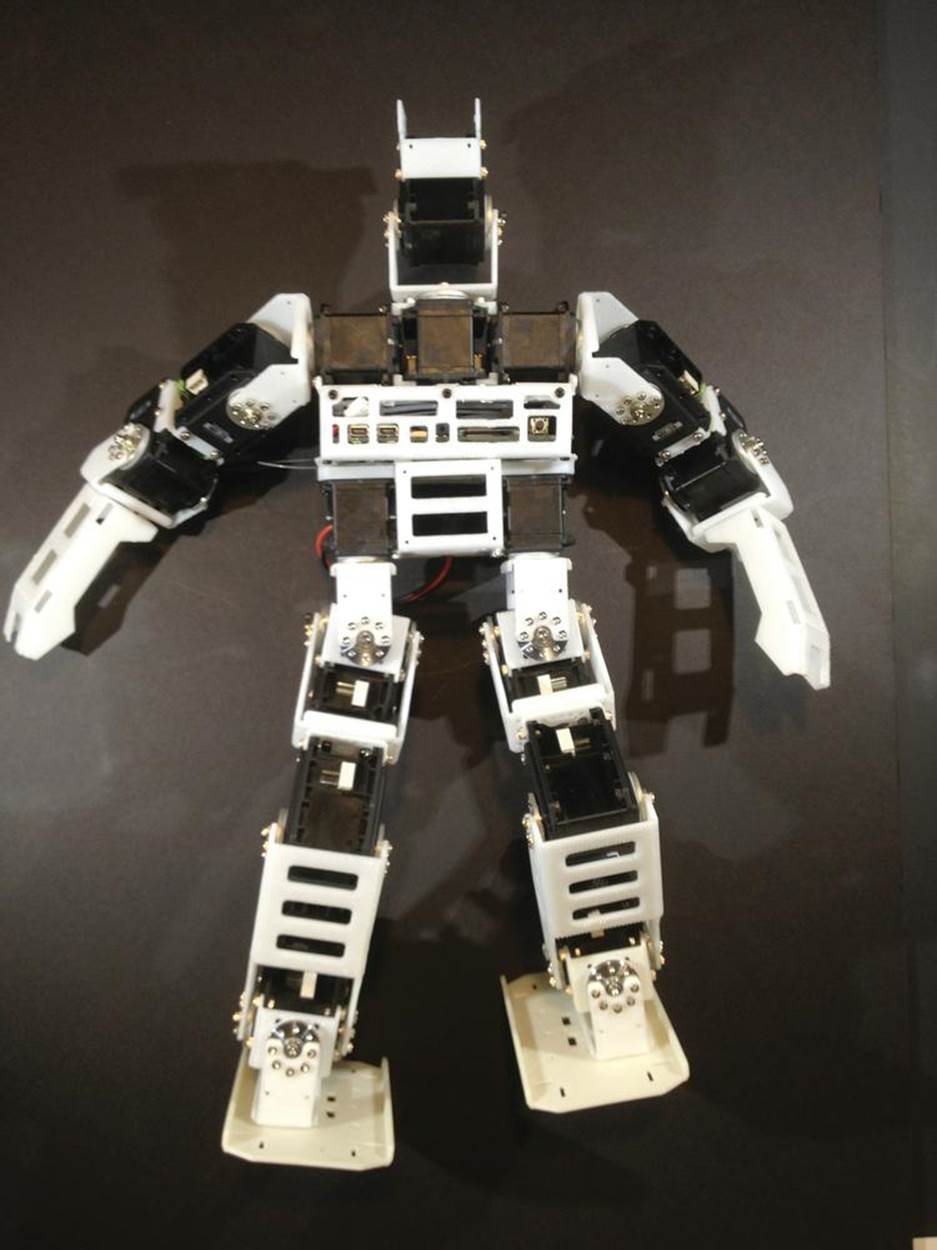
Figure 19-11. Another humanoid robot design from the Robotis assembly manuals
DIY vs. Commercial
To print the whole robot, I used two spools of plastic that cost about $90 total. Shapeways’s price is almost $1,000. That’s close to the price of many DIY 3D printers, and in my opinion the quality of DIY prints is now 70% to 80% as good as that of professional prints. Still, I’m considering having all the covers printed by Shapeways for about $400, as they’re the most difficult parts to get right.
What’s Next
Next I’ll download the control software to the Fit-PC2 and get this robot to walk, talk, and see, with as few modifications to the software and hardware as possible.
I may need to redesign some of the brackets and frames, because these were designed for aluminum. My friend Yoshihiro Shibata is helping me analyze DARwIn-OP’s structure to find its weak points when printed in plastic (see Figures 19-12 and 19-13). My plan is to redesign only the parts that break, to make them stronger, as I don’t want to add unnecessary weight.
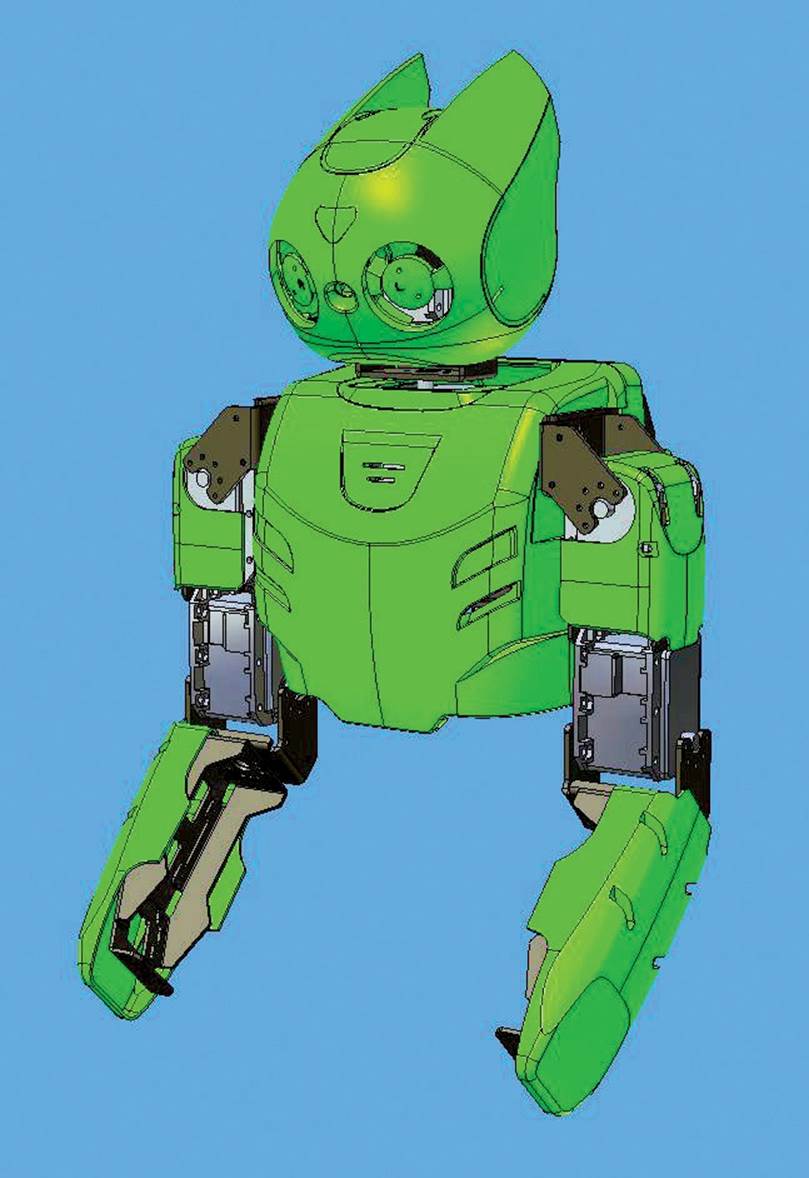
Figure 19-12. Analyzing DARwIn-OP’s structure
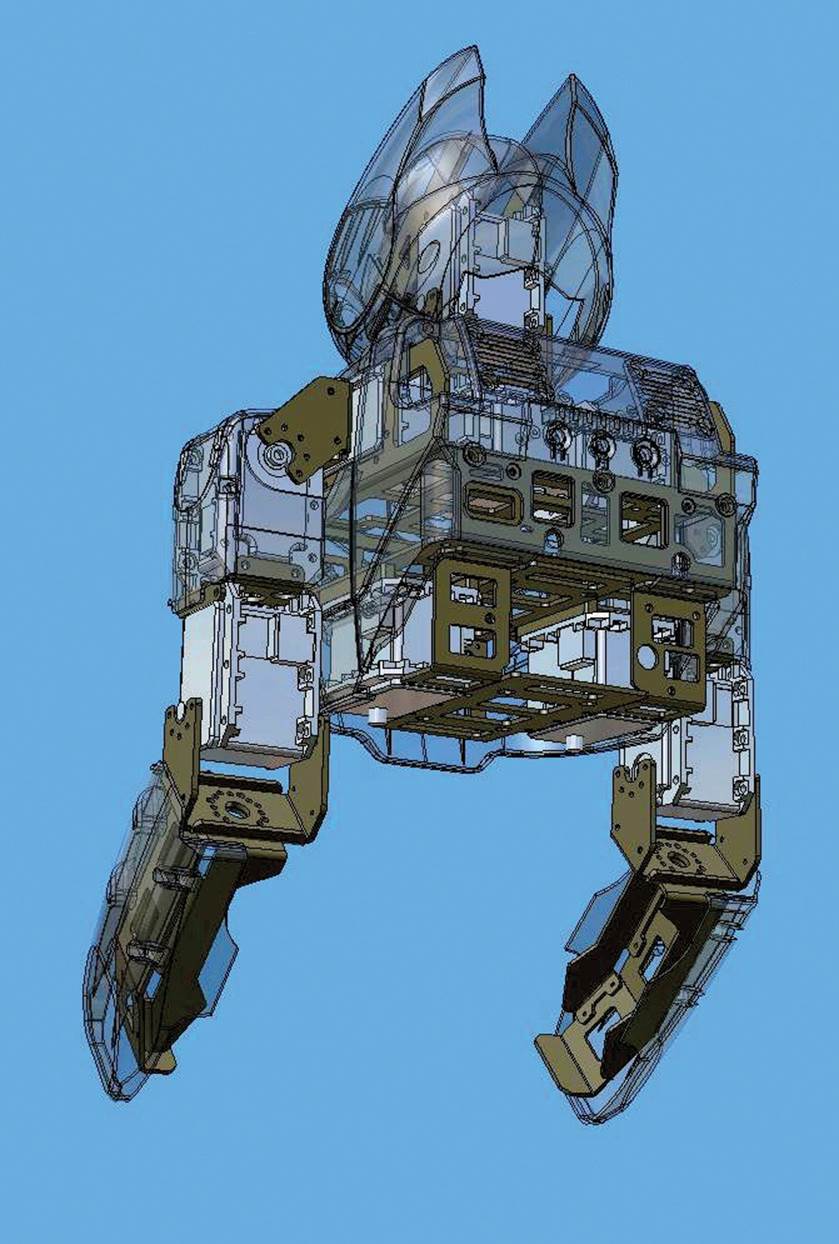
Figure 19-13. Finding weak points when printed in plastic
That’s one of the great benefits of personal manufacturing: if something doesn’t work, just redesign it and print it out. This process is called iterative design and experimentation. You can do it as many times as needed because the cost of a part is only a few dollars and you just have to wait for it to be printed!
After the robot is fully functional, I’ll modify its covers to resemble my favorite fictional humanoids, Robby, Gort, Atom, and C-3PO, and maybe add a fully articulating hand with fingers.
But I’ve come to realize that I may never be fully done with this project. I think the only limit is my imagination. This, I think, is the greatest benefit that we’ll get from the personal fabrication movement. It has opened up limitless possibilities for individuals to fully explore in solid form their dreams, ideas, and imaginations.
Special thanks to Luis Rodriguez, Rob Giseburt, Paul Piong, Roc Terrell, James Rao, and Kayla Kim for their printers and knowledge.
Michael Overstreet is a computer programmer by day and amateur roboticist by night. He and his humanoid robot Boomer have won medals in the last six RoboGames. He’s a founding member of the Cowtown Computer Congress hackerspace in Kansas City, MO., and has attended all of the national Maker Faires.
All materials on the site are licensed Creative Commons Attribution-Sharealike 3.0 Unported CC BY-SA 3.0 & GNU Free Documentation License (GFDL)
If you are the copyright holder of any material contained on our site and intend to remove it, please contact our site administrator for approval.
© 2016-2026 All site design rights belong to S.Y.A.